Робототехника В последние годы жизни Сергей Сергеевич Камынин занимался в основном вопросами робототехники. Здесь можно выделить два периода его деятельности - разработка алгоритмов и методов управления сборочными роботами и создание универсального промышленного робота-манипулятора. В течение первого из этих периодов под руководством и при непосредственном участии Камынина было создано программное обеспечение двурукого манипуляционного робота. В качестве прикладной задачи, служащей для проверки работоспособности разрабатываемых алгоритмов и методов управления, была выбрана задача сборки конкретного механического узла. Эта задача была успешно решена вопреки, казалось бы, непреодолимому противоречию между требуемой точностью сопряжения деталей (десятые доли миллиметра) и низкой точностью позиционирования манипуляторов (порядка нескольких миллиметров). Как шутили работавшие в то время с Сергеем Сергеевичем сотрудники: «Все думали, что задача не имеет решения. А Сергей Сергеевич не знал, что решения нет, и решил эту задачу». Созданные алгоритмы и методы управления получили дальнейшее развитие в процессе эксплуатации двурукого манипуляционного робота PRAGMA (Италия).
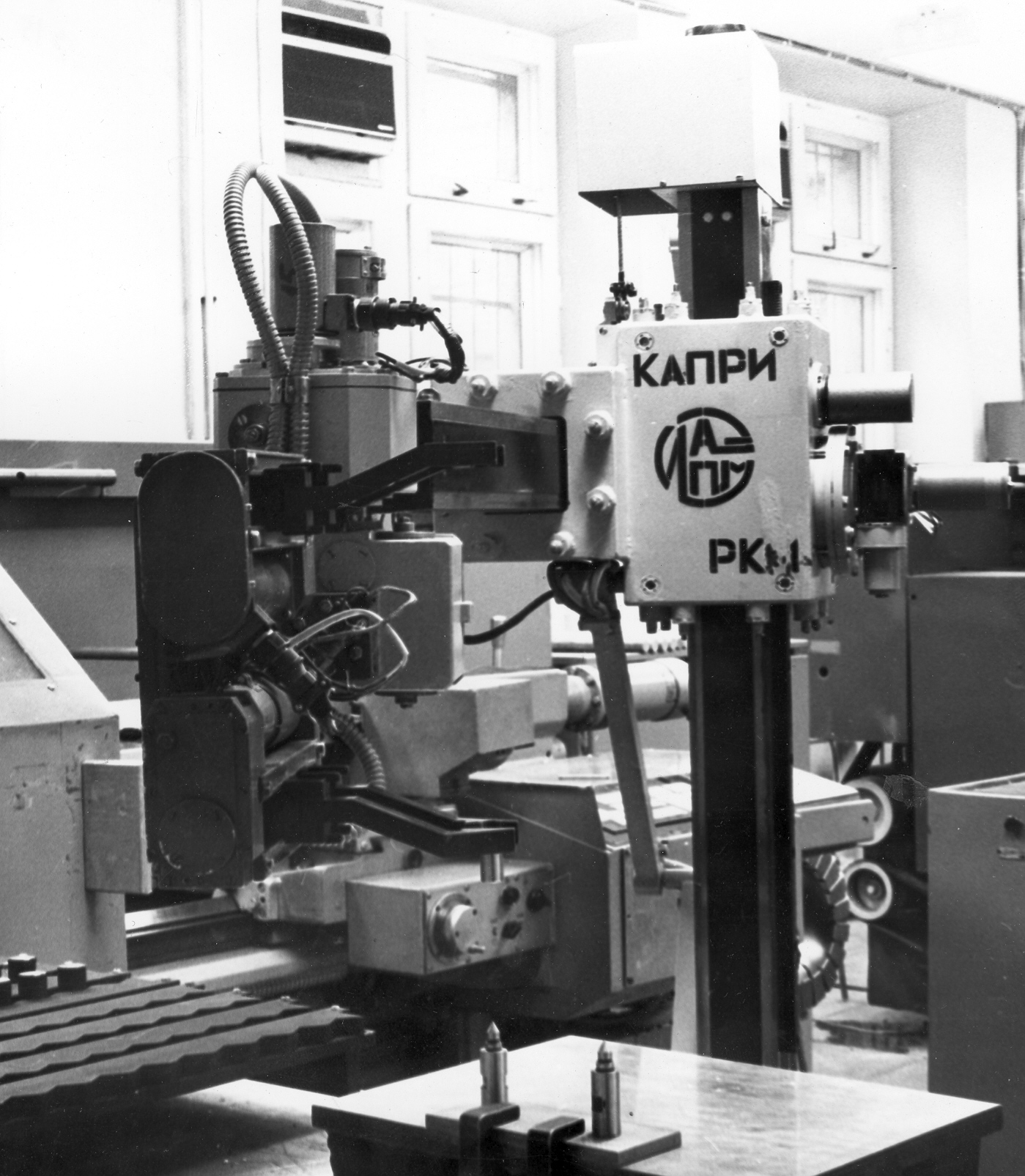
Еще одна интересная задача, которая была решена при непосредственном участии Сергея Сергеевича Камынина - инспекционное зрение. Основная идея этой задачи заключается в том, что информативный фрагмент считанного с видеокамеры изображения сравнивается с предварительно сохраненным в памяти фрагментом, соответствующим штатной ситуации. На основе результата сравнения делается вывод о правильности выполнения роботом нужных действий, и, как следствия, предпринимаются те или иные дальнейшие действия. Особенно ярко талант С.С.Камынина проявился в цикле работ по разработке универсального промышленного робота-манипулятора (совместные работы ИМП им. М.В.Келдыша и ИАЭ им И.В.Курчатова). По сути, он был основным автором всех составляющих компонент этого робота - механической части, аппаратуры системы управления и программного обеспечения. Идеи и методы, заложенные в основу разработки робота, позволили создать один из лучших образцов в своем классе.
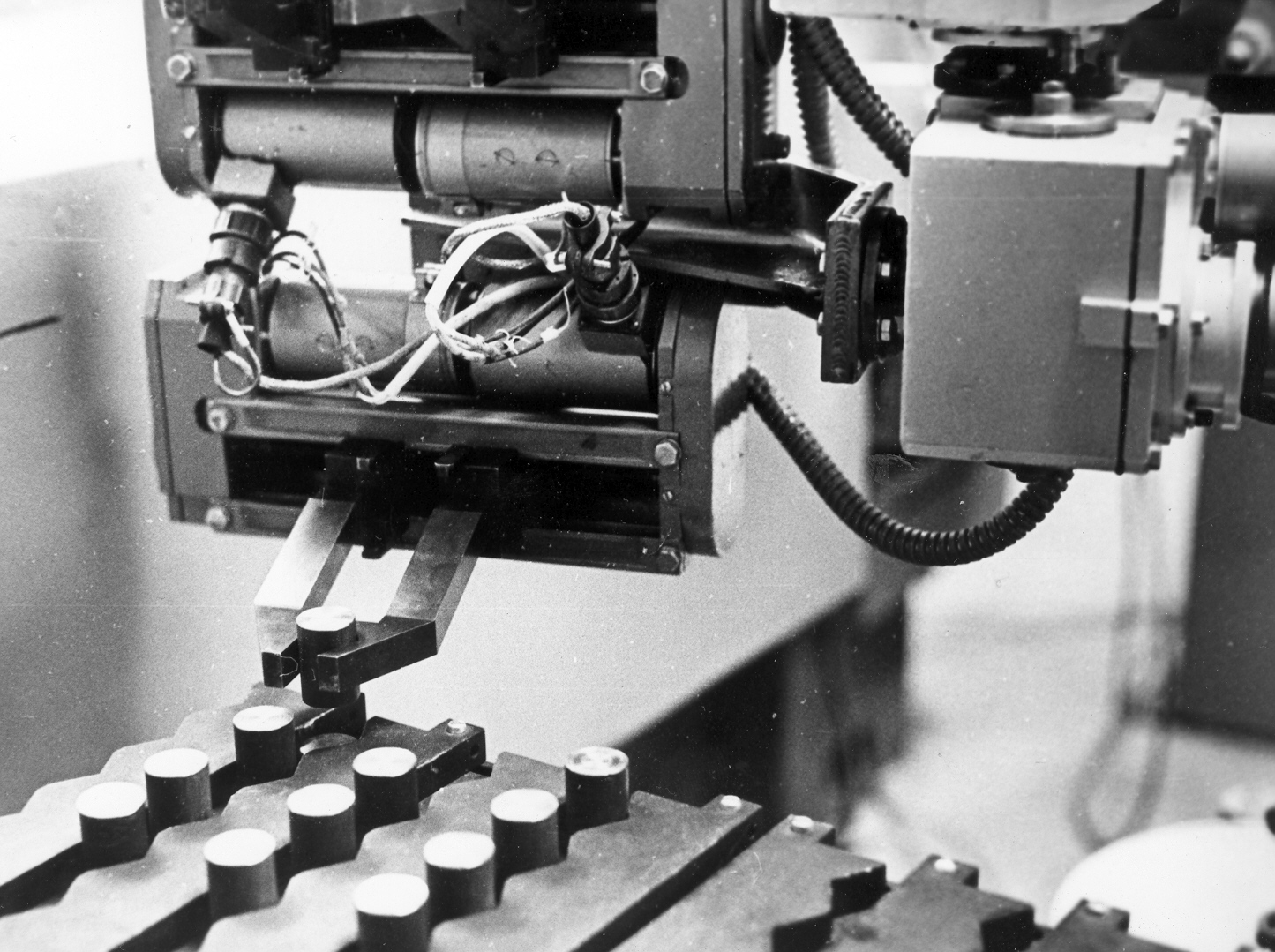
Поражает объем и результаты работ по механической части - практически Сергей Сергеевич поработал здесь за целое конструкторское бюро, применяя передовые идеи и методы. Формально не имея специального инженерного образования, он практически безошибочно принимал единственно верные решения. Проектируя робот, Сергей Сергеевич очень много думал и о безопасности его эксплуатации. Так, им был разработал специальный эксцентриковый механизм, блокирующий вертикальное перемещение руки при поломке уравновешивающего механизма. Не менее впечатляет разработанная Сергеем Сергеевичем система управления робота - как по своим высоким функциональным свойствам, так и по небольшим габаритам. Являясь полностью цифровой и выполненная на элементной базе только отечественного производства, она по тем временам не уступала зарубежным аналогам. Система управления обеспечивала высокоточное и надежное поведение робота при решении различного рода задач.
Говоря о программном обеспечении системы управления робота, нельзя в первую очередь не упомянуть о том, что в то время это была одна из лучших отечественных разработок подобного рода. Трудно перечислить все те идеи, находки и решения, которые были заложены в основу программного обеспечения. Созданное программное обеспечение позволило еще раз подтвердить утверждение, высказанное Сергеем Сергеевичем Камыниным ранее: робот, имеющий лишь простейшие средства «очувствления» (только датчики относительного положения звеньев), при наличии развитого управления является в достаточной степени способным на адаптивное поведение.
| |||||||||||||
| |||||||||||||